Contact
Vous souhaitez en savoir plus sur mon profil ou discuter d’un projet ?
Laissez-moi un message, je vous répondrai rapidement.
Vous souhaitez en savoir plus sur mon profil ou discuter d’un projet ?
Laissez-moi un message, je vous répondrai rapidement.
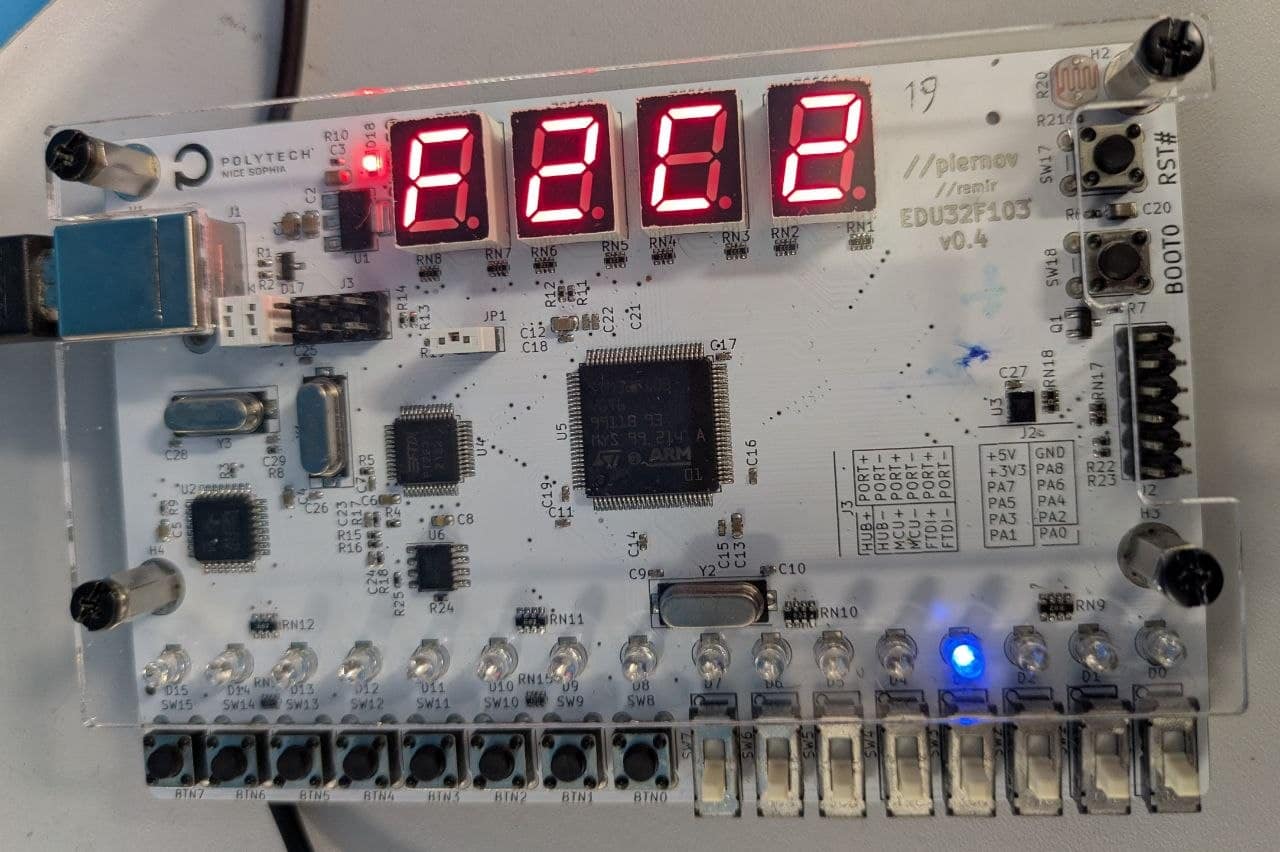
Développement d’un système de gestion de feux bicolores pour un carrefour à deux voies sous Zephyr OS.
Le projet simule deux voitures sur la voie 1 et trois sur la voie 2 afin d’assurer une circulation fluide et sécurisée.
La synchronisation du trafic repose sur l’utilisation de mutex et sémaphores, tandis qu’un bouton piéton permet d’interrompre le cycle des feux pour la traversée.
L’état du système (feux et véhicules) est affiché sur quatre afficheurs 7 segments, entièrement gérés par le programme.
Dans la démonstration, “F” indique un feu vert et “C” une voiture (ex. : F2 pour feu 2 au vert, C2 pour voiture 2 qui traverse).
Sur la vidéo de démonstration, la lettre “F” indique l’état du feu (vert) et la lettre “C” représente les voitures. Par exemple, F2 correspond au feu 2 au vert et C2 à la voiture 2.
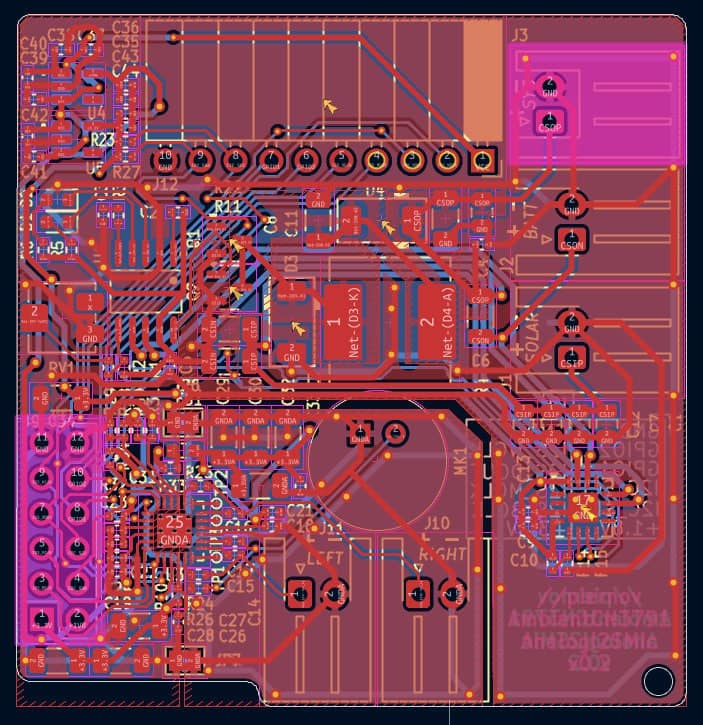
La mission consistait à adapter la conception du PCB du module d’alimentation en y intégrant un connecteur femelle 01×10 au niveau du schéma électrique en faisant au préalable une conversion 5V vers 3.3V et 1.8V. Cette modification avait pour objectif d’assurer une interconnexion directe avec la carte principale du projet, tout en supprimant la nécessité d’un circuit d’adaptation intermédiaire. Une fois la modification validée, le PCB a été commandé afin d’être intégré au système global. La principale difficulté rencontrée a concerné le routage, dans la mesure où les autres composants étaient déjà placés. Il m’a donc fallu trouver des solutions pour intégrer les composants additionnels tout en assurant un routage cohérent et fonctionnel.
KiCAD2 couchesSchematic, PCBplan de masse, viasGerber, BOM, fichiers .kicad_pcb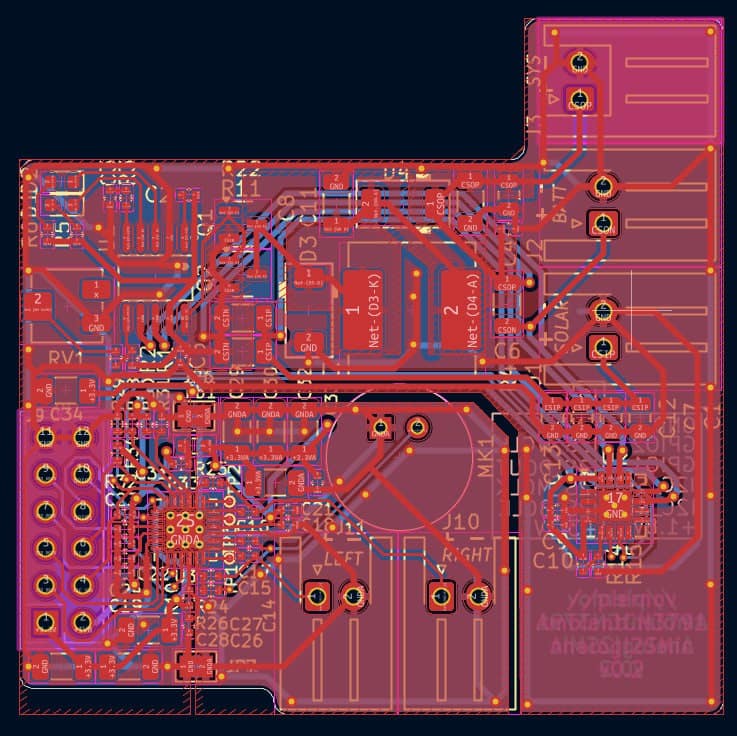
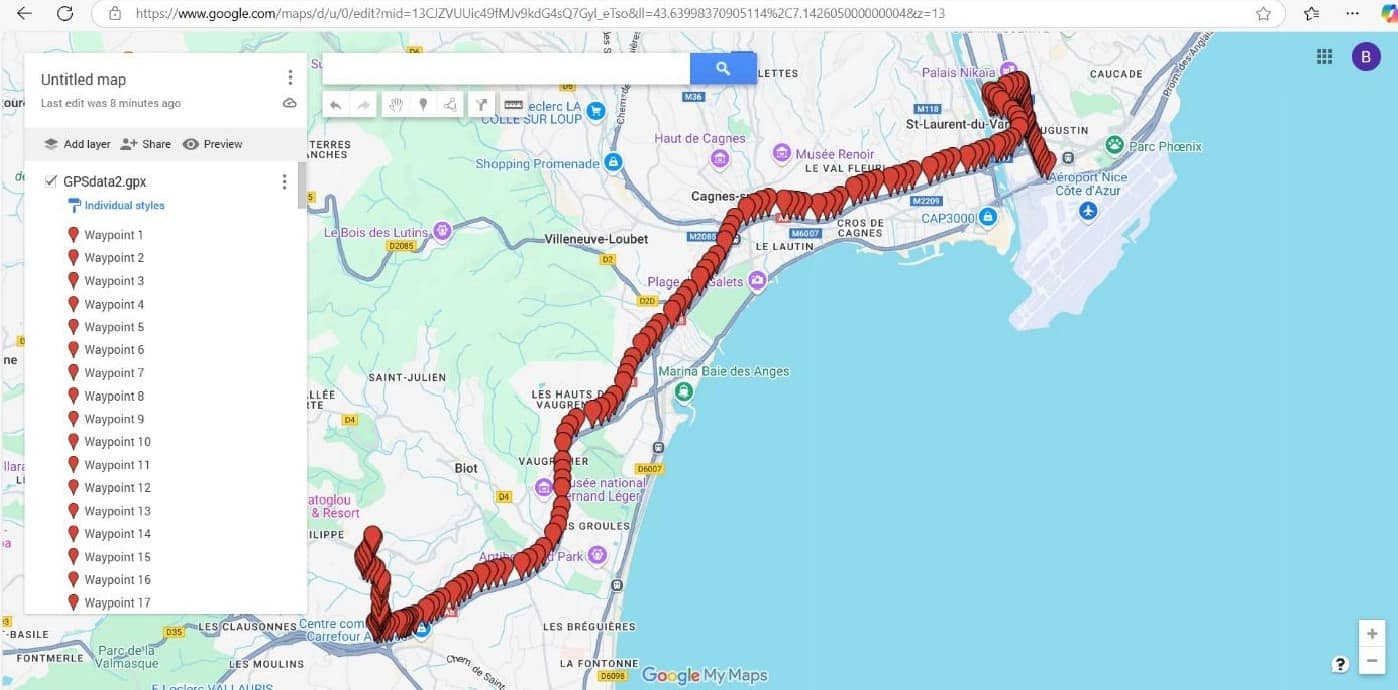
Ce système est destiné à des personnes telles que les patients atteints de la maladie d’Alzheimer. Il a pour objectif de générer des alertes en fonction de leur éloignement et d’analyser leurs déplacements. Pour cela, il repose sur deux volets principaux : d’une part, la localisation de l’utilisateur grâce au GPS et, d’autre part, l’enregistrement de ces positions sur une carte SD afin de permettre leur visualisation via un site Web. Ainsi, ce travail s’articule autour de trois axes : l’utilisation du GPS, l’intégration de la carte SD et la visualisation des données.
ArduinoGPSSDGPX
Robot Humanoïde Classique à 8 Degrés De Liberté/robot De Marche monté et programmé pour faire un parcours d’obstacles. Ce projet en robotique vise à concevoir un robot humanoïde capable d’interagir avec son environnement grâce à des capteurs et des actionneurs. Le système est contrôlé par une carte Arduino, facilitant l’intégration et la programmation des composants. Il contrôle un capteur infrarouge utilisé pour détecter la distance des objets environnants, permettant ainsi au robot de réagir aux obstacles et de minimiser les risques de collision et il contrôle 4 servomoteurs permettant au robot d’effectuer des mouvements précis pour se déplacer. En fonction des obstacles détectés, le robot pourra avancer, tourner à gauche ou à droite pour éviter les collisions.
ArduinoServomoteursInfrarougeChassis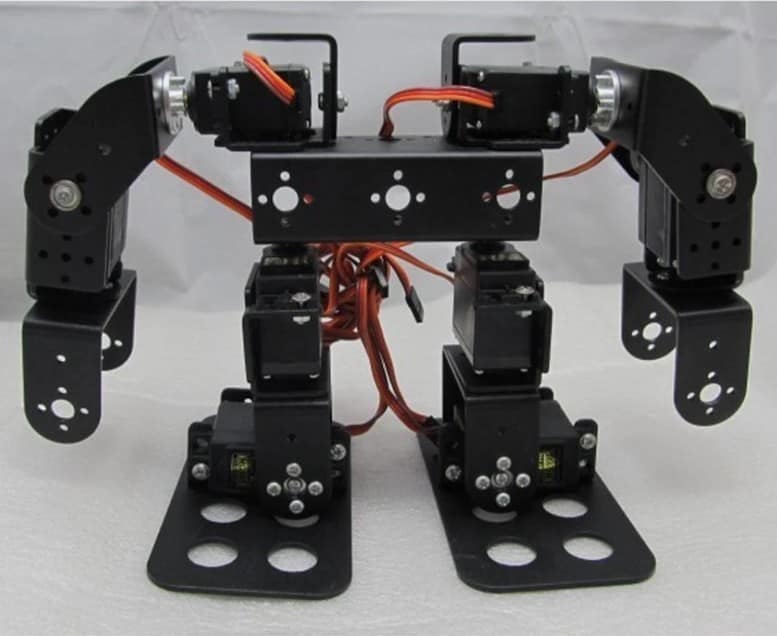
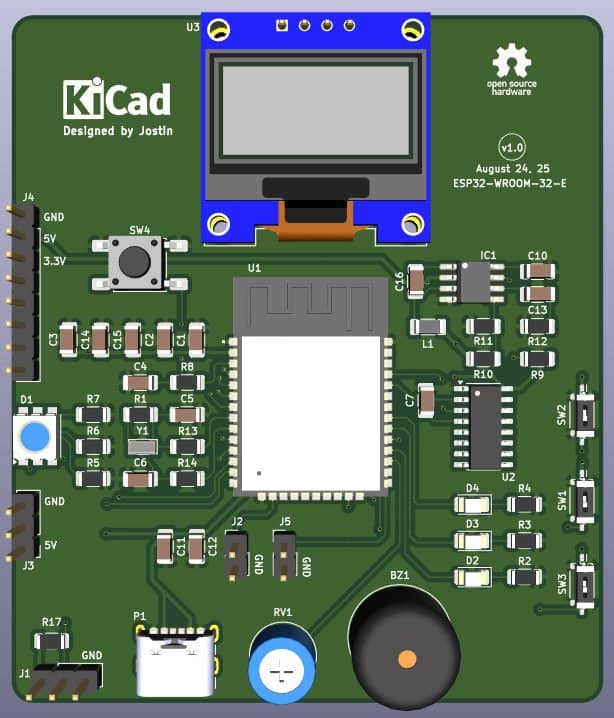
C’est un circuit intégrant un microcontrôleur ESP32-WROOM-32-E permettant de gérer des entrées/sorties :
KiCAD2 couchesSchematic, PCBplan de masse, viasGerber, BOM, fichiers .kicad_pcb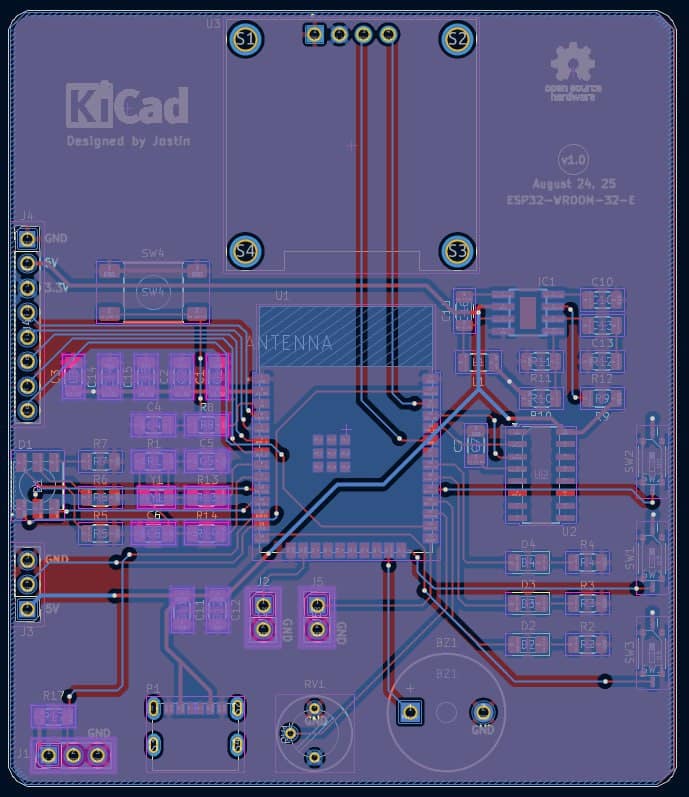
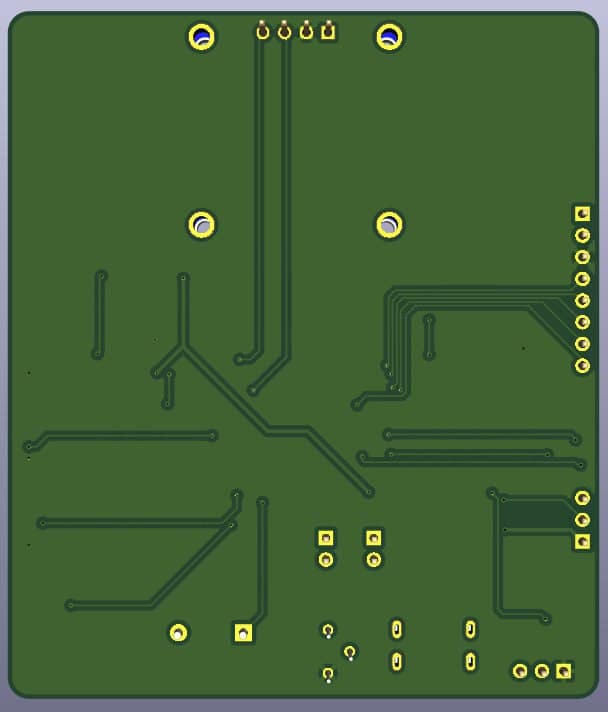
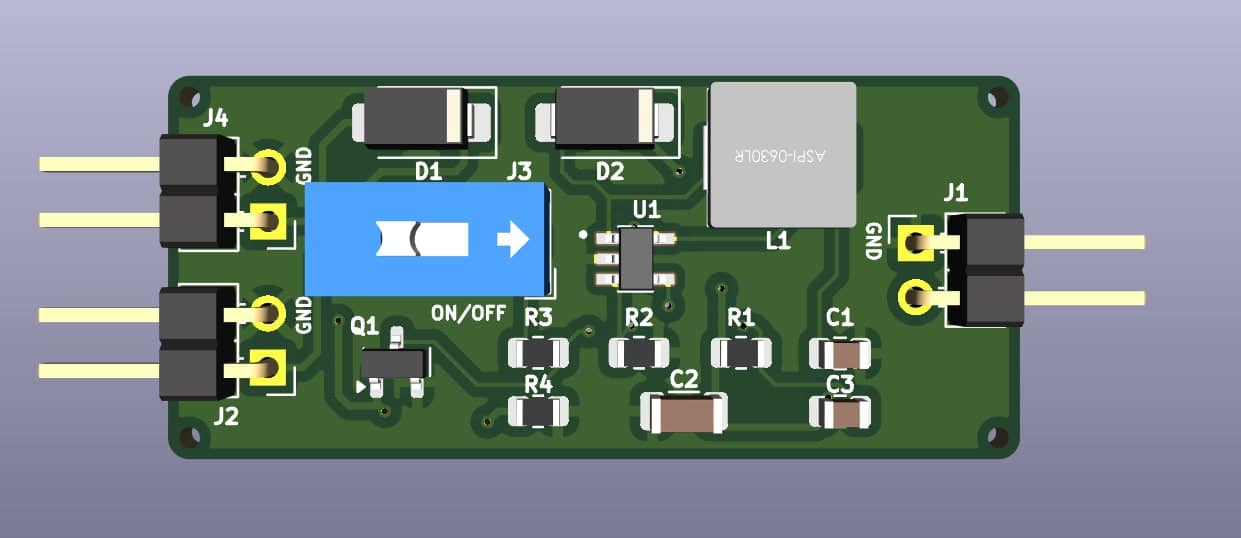
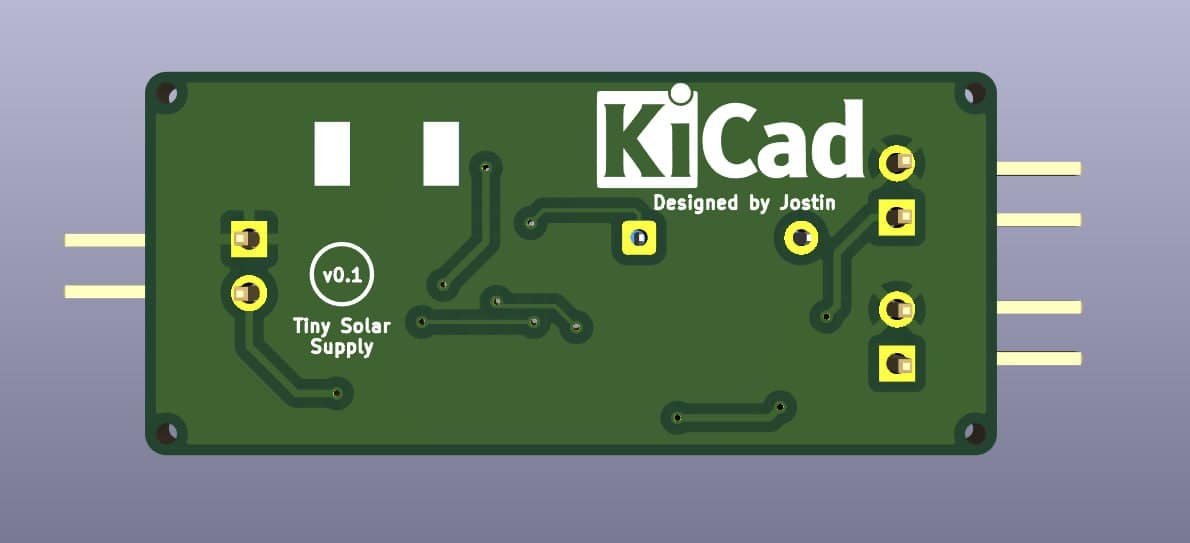
C’est un dispositif permettant de charger un système via un panneau solaire ou batterie avec circuit de protection :
KiCAD2 couchesplan de masse, viasfichiers .kicad_pcb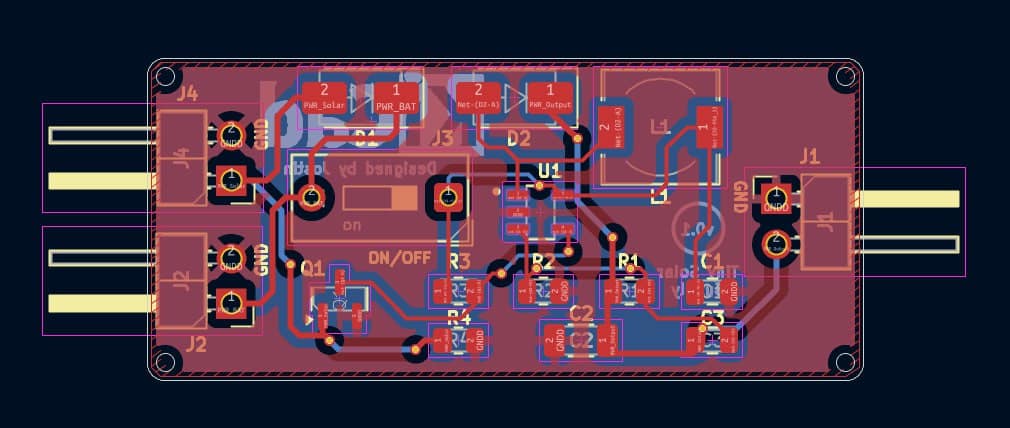
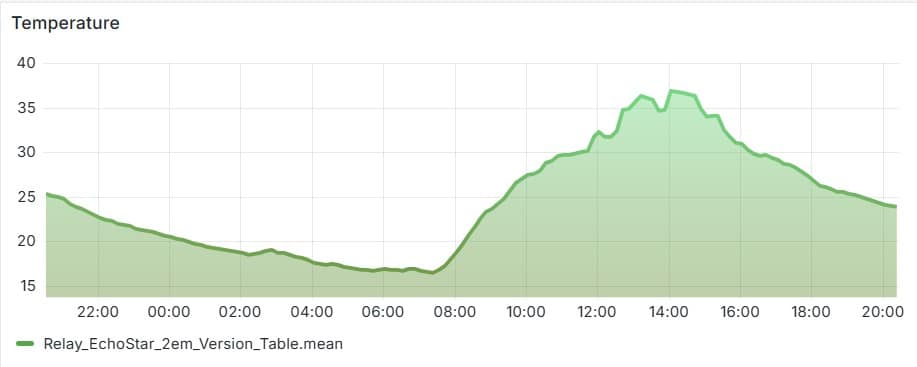
Ce projet est mené en collaboration avec l’IMREDD et repose sur une architecture composée de trois éléments principaux : un pluviomètre, un relais, et un module EchoStar. Le pluviomètre, équipé d’un microcontrôleur, mesure la température, l’humidité, les basculements et le voltage de la batterie. Ces données sont transmises au relais via une communication Point-to-Point (P2P). Le relais se charge ensuite de transférer les données, sans traitement, au module EchoStar via une liaison série. Ce dernier envoie les informations par satellite, qui les achemine au serveur. Une fois les données reçues, elles suivent la même chaîne de traitement que dans le projet terrestre : récupération par un broker, stockage en base de données, et affichage sur un tableau de bord.
ArduinoLoRa P2P, LoRaWANGrafanaNodeRED, MQTTAcknowledgment, WatchDog, LBT